Understanding Real Time
Bela is a real-time system. This page explains what “real-time” means, and what this means for you.
Defining “real-time” and “hard real-time” systems
In computing, “real-time” refers to any system that guarantees response within a specified time frame. This is called the “real-time constraint”. Bela’s real-time constraint is processing audio frames at audio rate, which is 44,100 frames per second.
There are different types of real-time systems, often called soft, firm, or hard. A firm or soft real-time system can miss a few deadlines, but performance will degrade if too many deadlines are missed. A hard real-time system is one that is subject to stringent deadlines, and must meet those deadlines in order to function. Bela is a hard real-time system, meaning that it must process audio frames at audio rate in order to function.
Though Bela is powerful enough to meet these time constraints under most conditions, this doesn’t mean that you can do any amount of processing on Bela and it will always hit deadlines. For example, if you want to apply filters or audio effects that require a significant amount of calculation (such as phase vocoders), you may need to consider how to optimise your code to achieve the performnace you want.
Timing and I/O in Bela
All I/O in Bela – audio, analog and digital – is synchronised to the same master clock. This means that audio and sensor data is always strongly aligned with no latency or jitter. It also means that programming conventions for handling I/O are somewhat different from other platforms.
Functions in a Bela project
Every Bela project must declare three functions: setup(), render() and cleanup().
setup(BelaContext *context, void *userData) runs once at the beginning of the program, before any audio or sensor processing has taken place. It is analogous to the setup() function in the Arduino environment. Your code here should allocate any needed memory and initialise program state.
render(BelaContext *context, void *userData) runs regularly, in a loop as long as the program is running. It is called by the Bela system. Your code within render() should process one buffer worth of audio, analog and digital data, using the information stored in the context data structure. For further information, see [[ Example projects and tutorials ]].
cleanup(BelaContext *context, void *userData) runs once at the end of the program, after audio and sensor processing has finished. Use it to clean up resources allocated in setup().
Working with I/O
All audio processing, as well as all analog and digital I/O, should be handled from render(). Every call to render() represents a small slice of time:
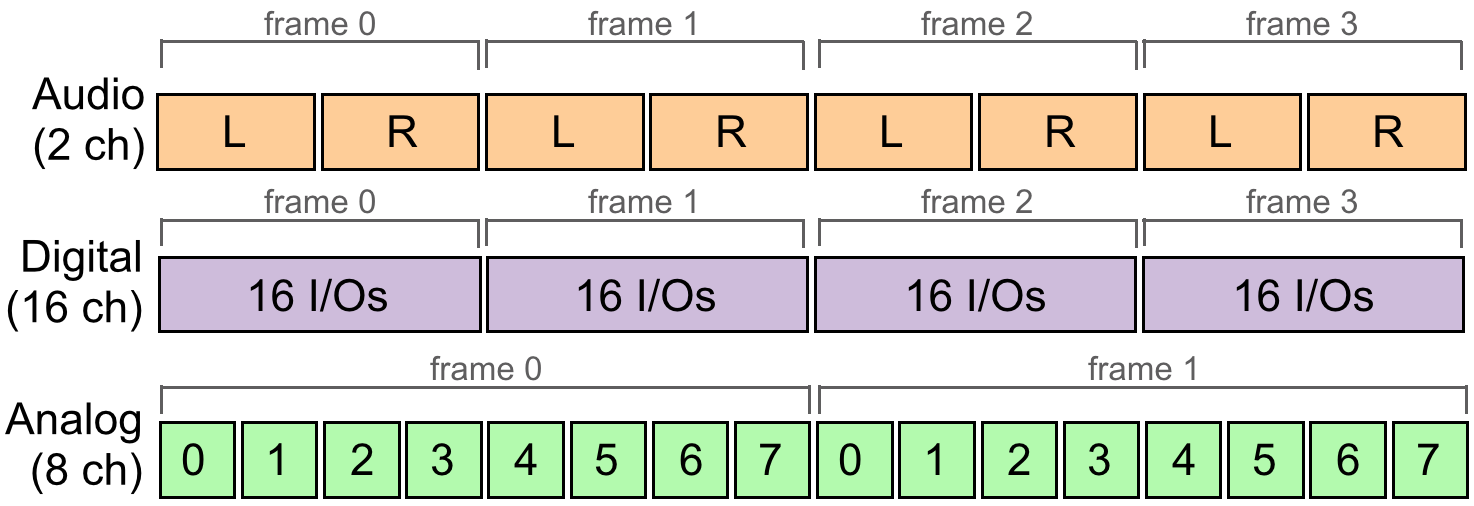
On Bela, analog and digital I/Os are sampled at a constant rate, regardless of whether you use the samples or not. All I/O is held within the context data structure. For example, if the buffer size is 4 audio frames and you are using 8 analog channels, then the structure will contain:
context->audioInis an array of 4 frames * 2 channels = 8 audio input samples. These samples were read by the hardware beforerender()began.context->audioOutis an array of 4 frames * 2 channels = 8 audio output samples which your program should write. They will be sent to the hardware afterrender()has finished.context->analogInis an array of 2 frames * 8 channels = 16 analog input samples. (2 frames because analog I/O runs at half the sample rate of audio I/O.) These samples were read by the hardware beforerender()began.context->analogOutis an array of 2 frames * 8 channels = 16 analog output samples which your program should write.context->digitalis an array of 4 frames. Digital frames are encoded as 32-bit words where bits 31-16 are the input or output value and bits 15-0 set the direction. While these can be set directly using bitwise operators, it is recommended that you use I/O functions below.
This is a contrast to Arduino and similar environments. For example, calling analogRead() on Arduino would cause the analog pin to be read at the moment the function runs. The rest of the code will stop until the analog to digital conversion has finished and analogRead() returns. On Bela, the analog input data is already present in the buffer. Calling analogRead() will retrieve the sample from the buffer. Your code does not need to wait for the conversion to happen.
Understanding the “frame” argument
All the I/O functions in Bela (digitalRead(), analogWrite(), etc.) take an argument for which frame to read or write the I/O pin. The frame indicates exactly what time the read/write should take place. The number of frames in any given call to render() depends on the Bela buffer size (which can be changed on the settings menu in the IDE or with the - p command line argument). By default, the buffer size is 8 analog frames or 16 audio frames. Valid frame numbers will range from 0 to (context->analogFrames - 1) for analog, (context->digitalFrames - 1) for digital and (context->audioFrames - 1) for audio.
Remember when calling analogWrite() or digitalWrite() that the value will not be updated immediately upon returning from the function. Instead, the output will be buffered and will change when the designated frame arrives.
I/O Functions
Bela provides a number of I/O functions. Your files should contain #include <Utilities.h> in order to use these functions. See the code docs for detailed usage.
audioRead– read an audio inputaudioWrite– write a digital outputdigitalRead– read a digital pindigitalWrite– write a digital pin, and hold the value going forwarddigitalWriteOnce– write a digital pin for one frame onlypinMode– change a digital pin to an input or output and maintain this going forwardpinModeOnce– change a digital pin to an input or output for one frame onlyanalogRead– read an analog pinanalogWrite– write an analog pin, and (depending on system setting) hold the value going forwardanalogWriteOnce– write an analog pin for one frame only
Example: int digitalRead(BelaContext *context, int frame, int channel)
This function works like digitalRead() on Arduino, but it takes two extra arguments. The first argument is the context data structure which is passed in to render(). This is needed because context holds all the references to the I/O buffers. The second argument is the frame (i.e. the time) at which to read the pin. The third argument, channel, is the pin to read, similar to the Arduino function. The value of the pin (HIGH or LOW) is returned.
Input/output pins
Analog input and output pins are provided on dedicated headers, labelled “IN” and “OUT” respectively.
Digital input/output pins are available on P8 and P9 connectors. The correspondency between physical pins and the digital pin numbers used in the software is outlined below.
Refer to the interactive diagram to find your way around the available pins on the cape: http://bela.io/belaDiagram/ .
Pin Digital in/out number
P8_07 0
P8_08 1
P8_09 2
P8_10 3
P8_11 4
P8_12 5
P9_12 6
P9_14 7
P8_15 8
P8_16 9
P9_16 10
P8_18 11
P8_27 12
P8_28 13
P8_29 14
P8_30 15